Maxon équipe le plus petit système de chirurgie assistée par robot du marché

L'Américain Virtual Incision a mis au point un robot miniaturisé de chirurgie abdominale qui se distingue par sa puissance et sa rapidité et offre au chirurgien un accès anatomique complet. Développé sur la base d'une conception itérative, ce robot a bénéficié de l'expertise technique de Maxon.
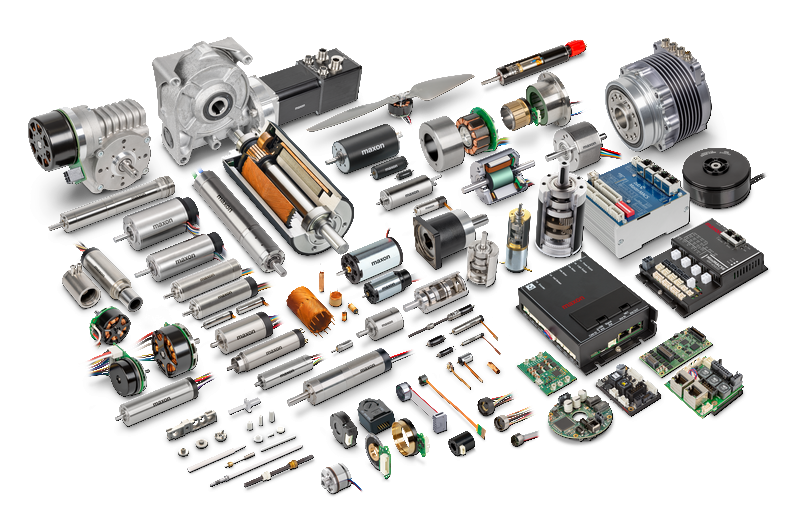
Maxon conçoit et fabrique une gamme complète de moteurs, de réducteurs et d'accessoires, qui répondent au besoin de conception itérative et rapide de MIRA et aux exigences élevées de vitesse et de couple (crédit photo : Hampi Kraehenbuehl, Fuerigen, Switzerland).
Les innovations actuelles apportées aux systèmes de chirurgie assistée par robot (RAS) sont destinées essentiellement à rendre possible la réalisation d'interventions mini-invasives selon des procédures reproductibles.
L'objectif visé est multiple : réduire la douleur du patient, gagner en précision, limiter la durée des interventions et écourter les séjours hospitaliers.
Basée à Lincoln aux Etats-Unis, dans l'Etat du Nebraska, la société Virtual Incision répond à la demande croissante des établissements hospitaliers en faveur de systèmes RAS sans perturber leur infrastructure existante. Pour ce faire, la société a conçu et fabriqué le MIRA, la première plateforme RAS miniaturisée au monde, qui peut être installée dans n’importe quelle salle d’opération.
MIRA se distingue des systèmes montés sur un bras ou sur un piédestal qui nécessitent un grand espace et sont moins faciles à porter. Ces systèmes encombrants sont limités à une utilisation dans des salles d’opération spacieuses et peuvent gêner le flux de travail en salle ainsi que la vision et les mouvements du personnel assistant le chirurgien.
MIRA a été testé cliniquement pour des interventions de résection intestinale (ablation totale ou partielle du côlon) et approuvé début 2024 par la FDA pour une utilisation commerciale dans les procédures colorectales. C'était la première fois que les moteurs d’un dispositif RAS fonctionnaient à l'intérieur même du corps humain.
Ce mini-robot est complété par une console assurant au chirurgien un contrôle total des bras instruments de MIRA et une vision endoscopique en temps réel de l'anatomie, ainsi que par un chariot compagnon pour transporter facilement l’équipement. L'installation est conçue pour garantir une utilisation simple et permettre à toutes les salles d'opération de bénéficier d'un système RAS, afin qu'un plus grand nombre de patient puissent être pris en charge. A l'heure actuelle, seule une salle d'opération sur dix a accès à un RAS.
Concevoir un dispositif de petite taille, puissant et facile à manipuler
Au cours de la phase de conception de MIRA, Virtual Incision a constaté que le principal défi technique consistait à créer un dispositif à la fois petit, portable et facile à utiliser, tout en maintenant la puissance nécessaire pour réaliser des opérations complexes, telles que la résection intestinale (ablation totale ou partielle du côlon).

Console permettant au chirurgien un contrôle total des bras instruments du robot MIRA et une vision endoscopique en temps réel de l'anatomie du patient (crédit photo : Virtual Incision).
En outre, l’entreprise souhaitait que l’appareil soit facile à nettoyer et à stériliser entre chaque intervention. Il s'agissait ici d'éliminer le besoin de drapage, tel que l'exigent de nombreux systèmes actuels sur le marché. Le drapage ajoute en effet du temps entre les procédures, ce qui peut potentiellement réduire le nombre de patients traités.
Une gamme complète de moteurs qui permet une conception itérative
Pour satisfaire à ces différents objectifs de conception, Virtual Incision a choisi de travailler avec maxon, qui a également contribué à la mise au point de la première caméra articulée intégrée jamais utilisée dans un système RAS. Le système MIRA présente des exigences élevées en raison des vitesses et couples élevés. Virtual Incision a jugé maxon tout à fait en mesure de soutenir son processus de conception itératif rapide « fabriquer et améliorer » grâce à sa gamme complète de moteurs et à son expertise mondialement reconnue. L'équipe d'ingénieurs de maxon a apporté son concours, de la conception initiale à la fabrication des sous-ensembles destinés à être intégrés dans MIRA. Elle a également aidé Virtual Incision dans les activités de test et de qualification de ces sous-ensembles.
De son côté, Virtual Incision a développé en interne tout le matériel, le firmware et les logiciels pour optimiser la miniaturisation et les caractéristiques de performance du dispositif.

Chariot de transport de l'équipement (crédit photo : Virtual Incision).
L'équipe a pu augmenter l'efficacité du système et maximiser la puissance de sortie délivrée par chaque articulation, ce qui le rend très puissant pour sa taille.
Une approche unique
Les systèmes RAS de type « mainframe » sont dotés de moteurs situés à l'extérieur du corps, placés sur des bras ou des piédestaux pour donner à l’appareil la force nécessaire. Dans le cas de MIRA, les moteurs sont placés à l’intérieur du corps humain. En effet, ils sont intégrés dans les bras rigides du robot et délivrent la puissance nécessaire pour manipuler de grands et lourds organes comme le côlon de manière rapide, tout en permettant la triangulation de la caméra et des instruments.
A noter que le design miniaturisé et autonome de MIRA lui permet d'accéder à tous les quadrants abdominaux tout en s'affranchissant du risque de collision entre les bras externes.




 X (ex Twitter)
X (ex Twitter) LinkedIn
LinkedIn