Intégrer moteurs et capteurs de force au profit du contrôle d’un exosquelette

Conçu pour offrir une aide à la marche active aux patients souffrant de faiblesse musculaire, l'exosquelette Autonomyo est mû par six modules d'entraînement innovants. Développés pour l'occasion par le fabricant allemand Faulhaber, ils se distinguent notamment par l'intégration d'un capteur de couple.
Le groupe de recherche Rehabilitation and Assistive Robotics (REHA Assist) de l'École Polytechnique Fédérale de Lausanne en Suisse (EPFL) a travaillé sur la conception d'un exosquelette destiné aux patients atteints de certaines maladies neuromusculaires. Il s'agit des personnes pour lesquelles les muscles sont encore fonctionnels, mais ne fournissent plus assez de force pour une position debout stable et un mouvement indépendant des jambes. Cette faiblesse musculaire est souvent progressive (dystrophie musculaire).
« Notre objectif avec Autonomyo était de surmonter ces limitations autant que possible à l'aide d'un support motorisé », explique Mohamed Bouri, directeur de REHA Assist.
Une assistance partielle légère
On pense naturellement aux exosquelettes conventionnels inspirés des humanoïdes. Ces dispositifs permettent aux personnes paraplégiques de marcher sans béquilles, mais ils pèsent plus de 40 kg. Avec seulement 25 kg, Autonomyo est donc bien plus léger et fonctionne avec l'appareil musculosquelettique affaibli mais encore partiellement fonctionnel du patient.
Le dispositif est fixé au torse par un corset et aux jambes par des manchettes. De chaque côté, trois moteurs fournissent la puissance qui fait défaut aux muscles pour le mouvement. Deux d'entre eux sont responsables de la flexion et de l'extension de la hanche et du genou. Le troisième moteur soutient l'abduction et l'adduction, c'est-à-dire l'écartement latéral de la jambe au niveau de l'articulation de la hanche. Ensemble, ces moteurs aident le patient à garder son équilibre et à marcher debout.
Une étude clinique a démontré que l'exosquelette fonctionnait comme prévu, apportant son soutien à l'utilisateur tout en lui laissant une certaine liberté de mouvement, en respectant ses intentions.
Une rétroaction par mesure magnétique de haute résolution
Il est d'ailleurs essentiel que le dispositif assiste la marche selon les intentions de l'utilisateur. « Le déclenchement initial pour commencer à marcher, s'exprime par un léger changement dans la position du membre inférieur », explique Mohamed Bouri. « Nous le détectons en combinant les informations en provenance d'une unité de mesure inertielle, de huit capteurs de charge au niveau des semelles et des codeurs des moteurs qui font office de capteurs de position des articulations. Toutes ces données contribuent à l'aide à l’équilibre ». Pendant la marche, l'interaction entre le dispositif et l'utilisateur est cruciale. Un capteur de couple développé par Faulhaber est chargé de détecter cette interaction et de mettre ainsi en œuvre la stratégie d’assistance avec précision.
La mesure du couple utilise classiquement des jauges de déformation sur les composants soumis à la force à évaluer. Le point faible de ces jauges est le lien adhésif qui sert à les installer. « Nous avons préféré utiliser un système de mesure magnétique à haute résolution », souligne Frank Schwenker, chef de groupe pour l'ingénierie avancée chez Faulhaber. « Nous obtenons ainsi un écart inférieur à 1,5 % dans la plage de mesure de +/-30 Nm ».
Le capteur fournit donc une valeur très précise du couple de réaction dans le mouvement de marche. Cette valeur joue un rôle central pour la commande de l'exosquelette Autonomyo, qui intègre bien sûr de nombreuses autres variables.
Sur la base de ces paramètres et de la rétroaction du mouvement, le logiciel calcule les signaux de commande destinés aux entraînements. Ces informations permettent de déterminer le type et le niveau de l'assistance que ces moteurs doivent fournir.
Puissance d'entraînement et potentiel de développement
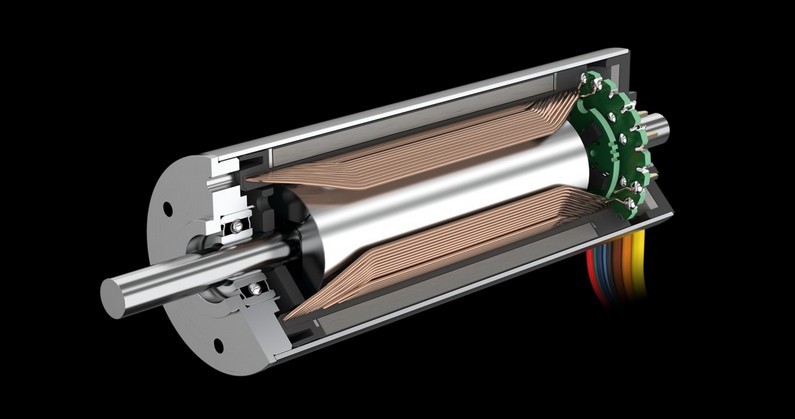
Moteur sans balais 3274 BP4 (crédit photo : Faulhaber).
L'ensemble des six unités d'entraînement provient de Faulhaber. Leur pièce maîtresse est le moteur sans balais 3274 BP4 d'un diamètre de 32 mm. Dans sa catégorie, il offre la plus grande puissance disponible sur le marché, d'après le fabricant. Sa force est transmise par un réducteur planétaire 42 GPT avec un arbre spécialement conçu pour cette application. Un codeur magnétique IE3 fournit les données de position à la commande. Quant au capteur de couple, il est intégré dans les réducteurs des quatre moteurs dédiés aux mouvements de flexion/extension.
On retrouve les exigences typiques relatives aux unités d'entraînement à base de petits moteurs haut de gamme. Des performances élevées pour un volume et un poids aussi faibles que possible, la précision, la fiabilité et une longue durée de vie font partie des caractéristiques les plus importantes dans cette application. « Trouver le bon fournisseur n'a pas été difficile », se souvient Mohamed Bouri. «Après avoir défini les spécifications, le nombre de moteurs admissibles était tout à fait gérable. Notre université travaillant déjà avec Faulhaber dans le groupe de recherche inter-facultés d'astrophysique, les bons contacts ont pu être établis. De plus, Faulhaber était capable de développer le capteur de couple dans un délai très court. C'était essentiel pour notre projet».
Fabriqué en petite quantité pour l'EPFL, ce composant ne figure pas au catalogue du fabricant, mais Frank Schwenker imagine un certain nombre d'autres domaines d'application : « La mesure du couple à haute résolution peut apporter une grande valeur ajoutée dans toutes les applications haptiques. Cela s'applique, par exemple, à tous les types d'assistance robotique en salle d'opération où le chirurgien guide l'instrument et la machine fournit force et précision. Mais le capteur peut également assumer une fonction de protection et être utilisé pour la limitation du couple. En outre, il s'avère utile pour la documentation dans l'assurance qualité, à chaque fois qu'il est nécessaire de démontrer des valeurs de couple très précises ».
A voir sur le stand L27, Hall 8b, de Compamed 2023




 X (ex Twitter)
X (ex Twitter) LinkedIn
LinkedIn