Le laser ultra-court : un outil polyvalent au service des innovations médicales
Vecteur d’innovation médicale via l’usinage, le marquage et la fonctionnalisation de dispositifs médicaux, le laser femtoseconde est aussi révolutionnaire sur le terrain de la découpe chirurgicale. En particulier si on peut le combiner à la robotique comme dans le projet LARA, coordonné par ALPhANOV.
Formidables outils utilisés dans la production de dispositifs médicaux, notamment pour la découpe de haute précision, les lasers femtoseconde sont aussi exploités en chirurgie. C’est le cas en ophtalmologie lors de chirurgies réfractives cornéennes, qui consistent à découper le volet cornée par laser (LASIK) à la place du microkératome, ou encore lors de la capsulorhexis assistée par laser femtoseconde pour la chirurgie de la cataracte.
Vers un usinage en 3D
Longtemps limitée à des procédés planaires en raison de la difficulté à transporter les impulsions ultra-courtes à travers une fibre optique, la filière industrielle vit depuis quelques années une nouvelle révolution avec l’arrivée des fibres creuses. Celles-ci rendent en effet possible le transport de ces impulsions ultracourtes et ainsi l’usinage 3D grâce au couplage à des bras robotisés.
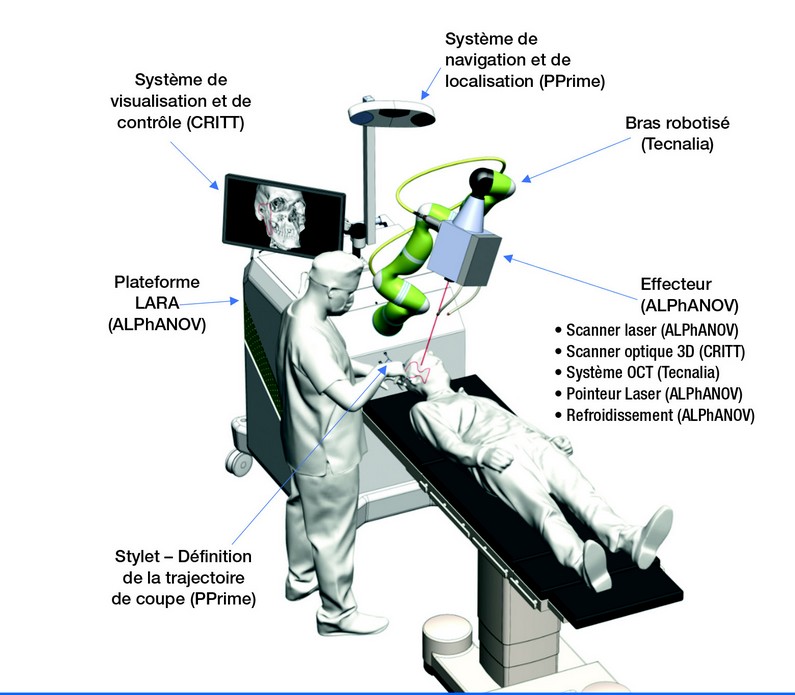
C’est dans ce contexte que le projet LARA (Laser Robotic Applications) vise à associer robotique et lasers à impulsions ultrabrèves pour les applications de découpe de tissus osseux en chirurgie maxillo-faciale. Il s’agit plus précisément de fabriquer un prototype combinant une source laser femtoseconde optimisée pour la découpe de l’os avec un bras robotisé et des systèmes de positionnement et de contrôle en ligne. La finalité de ce projet est de garantir au chirurgien des gestes sécurisés, performants, sans contact, plus précis et décrivant des trajectoires complexes pour améliorer la qualité de coupe et de régénération des tissus osseux.
Ce prototype sera, dans une première phase, testé sur des échantillons biologiques et validé ensuite sur cadavres au laboratoire d’anatomie de l’Université de Bordeaux.
Une découpe mécanique limitative
Rappelons que la chirurgie maxillo-faciale permet de traiter des pathologies traumatologiques, carcinologiques et malformatives de la face. Il peut s’agir aussi de chirurgie reconstructrice des lambeaux et de microchirurgie.
Les avancées scientifiques et technologiques en médecine ont permis d’améliorer considérablement les pratiques en chirurgie maxillo-faciale, ce qui a favorisé la diminution des taux de morbidité et la réduction des phases de suivi post-opératoire. Néanmoins, la plupart des interventions aujourd’hui se basent encore sur l’utilisation des instruments de découpe mécaniques. Ceux-ci limitent la forme et la précision de découpe et endommagent les tissus osseux de façon importante, ralentissant ainsi sa régénération et le rétablissement final du patient.
Pas de chaleur, pas de dommages
Le laser intégré dans le prototype délivre des impulsions infrarouges d’une durée d’environ 500 femtosecondes avec une énergie d’une dizaine de microjoules et un taux de répétition de la gamme d’une centaine de kilohertz.
Avec ce type de source laser, le processus d’ablation ultracourt est quasi athermique. Cela permet de limiter l’endommagement du tissu osseux. Les effets thermiques étant réduits, il est possible d’obtenir une très haute qualité de découpe en minimisant projections, bourrelets et stress mécanique dans les tissus osseux environnants.
Cependant, le taux d’ablation atteignable aujourd’hui avec ce type de source reste assez limité, impliquant des temps d’intervention chirurgicale trop élevés par rapport aux solutions actuelles. Le choix de focaliser les applications sur la chirurgie maxillo-faciale est donc justifié par le besoin de ce type d’approche de haute précision sur des régions de tissus osseux de petite taille avec un fort impact esthétique pour le patient.
Un consortium translationnel pour un projet transverse
Financé par la Région Nouvelle-Aquitaine en octobre 2022, le projet LARA a été prévu sur 32 mois. Il implique un consortium translationnel composé de cliniciens, d’académiques et de centres technologiques qui regroupent l’ensemble des compétences pour répondre aux défis technologiques et cliniques soulevés par ce projet.
Centre technologique spécialisé en photonique et laser, ALPhANOV participe à l'innovation industrielle depuis 2007 en intervenant tout au long de la chaîne de valeur, de la recherche appliquée à l’accompagnement technologique des créateurs d’entreprises.
Il est coordonné par ALPhANOV qui aura la charge du développement du système laser femtoseconde et du process de découpe de l’os.
Le service de chirurgie maxillo-faciale au CHU de Bordeaux est le partenaire clinique du projet. Il lui incombe de définir l’application cible, le protocole clinique et le cahier des charges fonctionnel du système ainsi que de valider le prototype sur cadavre.
Le CRITT Informatique s'est vu confier le développement d’un système d’imagerie 3D pour permettre la réalisation d’un modèle numérique du crâne du patient et faciliter ainsi la planification pré et per-opératoire du geste chirurgical.
L’Institut PPrime, laboratoire de recherche du CNRS spécialisé en robotique, devra réaliser le système et la procédure de positionnement du bras robotique durant la procédure chirurgicale.
Le centre technologique Tecnalia France, via ses divisions spécialisées en robotique et imagerie médicale, est en charge du développement du système robotique ainsi que du système de monitoring en ligne OCT des découpes laser.
Un prototype fonctionnel en 2025
Aujourd’hui, plusieurs volets techniques avancent en parallèle pour garantir l’intégration d’un prototype fonctionnel en 2025. Différents tests ont été réalisés pour optimiser l’ablation du tissu osseux en régime femtoseconde IR et calibrer les instruments de contrôle de la découpe tel que le système OCT. En parallèle, un stylet optique équipé d’un cluster de marqueurs optiques est en cours de développement afin de faciliter l’interface chirurgien-robot pour la définition de la trajectoire de découpe.




 X (ex Twitter)
X (ex Twitter) LinkedIn
LinkedIn