Composants > Mécanique
Des structures nanorobotiques de préhension réalisées par pliage
Des chercheurs de l'Institut Femto-ST ont mis au point un procédé de fabrication de structures nanorobotiques par pliage en trois dimensions d'une membrane multi-couche. Elles sont par ailleurs actionnables selon un principe électro-thermo-mécanique.
Le développement des nanotechnologies en optique et électronique, mais aussi en biologie et médecine, a fait émerger un nouveau champ de recherche qui vise à réaliser des systèmes nanorobotiques capables de manipuler des objets de très petites dimensions. Mais jusqu'ici, la plupart des systèmes sont basés sur des technologies de microfabrication planaire (2D), ou, s'ils sont réalisés en 3D, restent des structures passives, non actionnables.
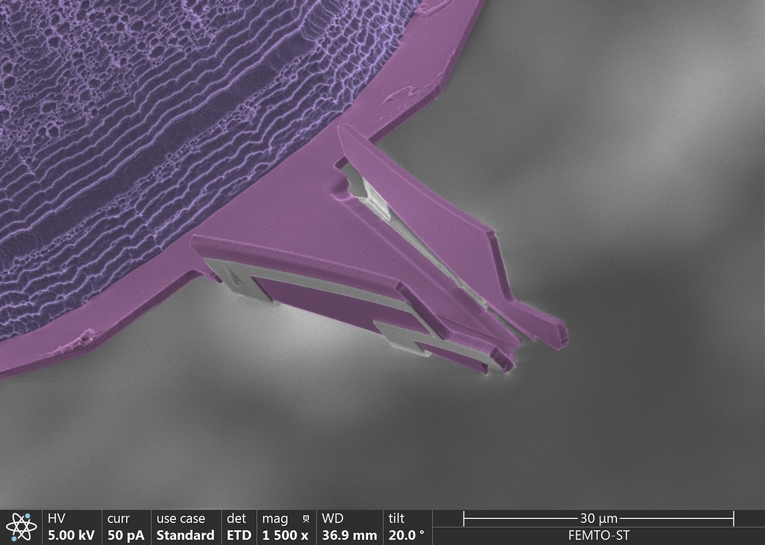
Des chercheurs de l'Institut Femto-ST (CNRS/Comue BFC) ont mis au point un procédé de fabrication de structures nanorobotiques tridimensionnelles actionnables. Ils ont montré l'efficacité de leur procédé en réalisant une pince pour la préhension de micro-objets. Celle-ci est basée sur une membrane en silice sur laquelle sont déposées des électrodes d'aluminium. Des déformations sont induites dans le matériau sous l'action d'un faisceau d'ions focalisé (FIB, Focused Ion Beam) : la structure se plie, les électrodes d'aluminium jouant le rôle de charnières. L'application d'un courant électrique permet d’actionner la pince de manière précise et continue pour saisir ou relâcher un objet.
Les chercheurs ont acquis une compréhension fine du mécanisme de pliage assisté par FIB (notamment à l'aide de simulations numériques), ce qui leur permet de le contrôler en jouant sur les paramètres du procédé. Ainsi, l'angle de pliage varie de -70° à + 90°, tandis que l'ouverture initiale de la pince peut être adaptée à des objets dont la taille s'étend de quelques dizaines de nanomètres à quelques dizaines de microns. Les chercheurs ont utilisé leur micro-pince pour déplacer une fibre optique d'un diamètre de 6 à 8 µm. Les usinages par faisceau d'ions, ainsi que les tests et mesures, ont été réalisés sur la plateforme µRobotex.

Soumise à un faisceau d’ions gallium, la membrane de silice se plie, les électrodes d’aluminium jouant le rôle de charnières (source UFC).
Au-delà de cette démonstration sur un cas relativement simple, le nouveau procédé ouvre la voie à la réalisation de systèmes nanorobotiques polyarticulés, dotés de plusieurs degrés de liberté. Autre piste de recherche : l'intégration dans le système de la mesure des forces appliquées aux objets, ce qui permettrait d'augmenter la dextérité de la pince, et par exemple de saisir des matériaux mous sans les endommager.
Le champ d'application du travail effectué par les chercheurs peut s'étendre au biomédical moyennant des modifications de conception. Il s'agirait notamment de rendre le dispositif biocompatible. Dans le cas de la pince, elle pourrait alors servir à manipuler des cellules, des objets, des bouts de tissus... avec des dimensions de l'ordre d'un micron, voire moins. Une telle pince pourrait aussi être utilisée pour réaliser des déformations afin de créer un stimuli et d'étudier le comportement mécanique d'objets d'intérêt.
La technologie de Femto-ST peut aussi être intéressante dans la réalisation de puces fluidiques, qui intègreraient des structures permettant de réaliser des actions, voire de la mesure in situ.




 X (ex Twitter)
X (ex Twitter) LinkedIn
LinkedIn